Расчет и проектирование пилотируемого коптера. Эффективный квадрокоптер. Давайте рассмотрим приведенные характеристики
Доброго времени суток, дорогой читатель. Сегодня мы поговорим о том, что поднимет твой летательный аппарат на новые высоты… ну или хоть на какие-то. Речь пойдёт об электромоторах. Я расскажу тебе о том, как выбрать двигатель для квадрокоптера твоей мечты, и о многих других нюансах, связанных с этой темой. Поехали!
Первым, с чем ты столкнёшься при выборе будут эти два термина. Это две разных реализации двигателей. Главное отличие – расположение обмотки.
Спонтанный ликбез:
Статор – неподвижная (статичная) часть движка.
Ротор – вращающаяся (rotation) часть.
Коллекторные
Обладает щеточно-коллекторным узлом. Коллектор, это набор контактов (обмоток), расположенных на роторе, и щётка – скользящий контакт, расположенный на статоре. Как раз наличие этой щётки и убавляет ресурс коллекторного мотора, ибо создаёт трение. Двигатель начинает вращаться при подаче на него постоянного тока, а направление вращения зависит от полярности оного. Плавно разгоняются и замедляются.

Преимущества
- Маленький вес и размер
- Низкая стоимость
- Прост в ремонте
Недостатки
- Низкий КПД
- Низкая скорость вращения
- Перегрев
- Быстрый износ
Бесколлекторные (бесщёточного типа)
Состоит из ротора с постоянными магнитами и статора, с обмотками. Изменение направления вращения осуществляется изменением полярности (Нужно поменять два провода из трёх). Разгон и замедление происходят очень быстро (рывком). Имеют разное количество полюсов. Чем их больше, тем медленнее, но с большим усилием, вращается ротор.

Преимущества
- Высокая скорость вращения
- Износостойкость
- Защищённость от внешних воздействий
Недостатки
- Стоимость
- Сложный ремонт
Тут есть нюанс. Устройство двигателя бесколлекторного типа может отличаться.
- Inrunner – Стандарт. Ротор с постоянными магнитами вращается в статоре с обмотками.
- Outrunner – Нестандарт. Здесь ротором выступает корпус, который вращается вокруг статора с обмотками.
Характеристики двигателя

Мощность (потребляемая)
Измеряется в ваттах. Чем больше мощность, тем быстрее кончится батарея. Тут всё просто
Вес
Чем больше вес, тем мощнее и медленнее (обычно). Важно помнить, что вес самого движка нужно учитывать при расчёте веса, который он должен поднять.
Энергоэффективность (КПД)
Комплексное понятие, которое зависит ещё и от батареи, контроллера, пропеллера, и даже проводов. Тут подробно останавливаться не буду- чем выше, тем лучше. Двигатель с КПД 70% тратит 70% потреблённой энергии на полёт, а 30% на обогрев окружающей среды и приближение тепловой смерти вселенной. Для бесколлекторных нормой является 90%, а для коллекторных 70%.
Температура нагрева в работе
Как ты уже понял- напрямую зависит от КПД. Чем больше греется, тем больше тратит энергии впустую.
Балансировка и уровень вибрации
По сути, это качество исполнения. Есть такая вещь как допуск. Этот те пределы, в которых отклонение от идеала не считается проблемой. Чем выше точность изготовления, тем более соосной будет система, и тем меньше будет вибраций. Иногда лучше не брать самое дешёвое.
Вибрация в двигателе ускоряет его износ, износ прочих деталей, раскручивает винтики и шумит. Неприятное явление.
Тяга
Тяга, она же подъёмная сила. Это тот вес, который может поднять двигатель (включая самого себя). Но это не значит, что для двухкилограммового квадрокоптера нужно четыре двигателя. Нужен запас тяги, нужно учесть помехи, и банальную не идеальность моторов.
Формула будет примерно следующей.
Тяга одного мотора = (вес коптера * 2)/ кол-во движков
В итоге, для квадрокоптера весом 1 кг нужно 4 двигателя с тягой 500 грамм.
KV
Это достаточно сложный параметр – обороты на вольт без нагрузки. То есть если мы имеем моторчик в 1000 kv, то при подключении его к источнику тока с напряжением 12 вольт, он выдаст 12 000 оборотов в минуту (KV*U). Однако, это всё крайне теоретически.

На практике есть нагрузка, и создаваемое им сопротивление воздуха. Из этого следует, что обороты будут ниже, или их не будет вообще, так как от КВ зависит крутящий момент. Чем выше параметр КВ, тем меньшее усилие развивает электродвигатель.
Для понимания процесса (грубый пример).
Так как электродвигатель работает из-за перемены полярности электромагнитов с определённой частотой, то кв, по сути, характеризует частоту, с которой изменяется полярность магнитов, к которым притягивается постоянный магнит. для простоты примем, что постоянный магнит на роторе. Если всё идёт по плану, то ротор проходит путь от одного переменного магнита до другого, после полярность меняется, и он идёт дальше.
Если слишком часто менять полярность, или увеличивать нагрузку, то ротор просто не успеет разогнаться и преодолеть нужный путь, и его начнёт притягивать обратно, или же он вообще не сдвинется с места. Это похоже на пробуксовку колеса авто на льду. Чем выше скорость вращения и вес авто, тем больше оно будет проскальзывать, и меньшее усилие развивать.
В итоге, никто не знает сколько нужно, ибо параметр не поддаётся простому определению. Можно просто ориентироваться на следующие цифры. Лёгкий гоночный коптер с маленькими пропеллерами имеет KV 2100—2500, а для тяжёлых, многокилограммовых аппаратов нужно брать что-то в районе 200-900 KV.
Как правильно выбрать

Есть несколько основных параметров, исходя из которых придётся выбирать. О них ниже. Прежде всего, советую перейти на сайт калькулятора Ecalc, и ознакомиться с калькулятором. Он позволит как подобрать примерную комплектацию коптера, так и рассчитать полётных характеристики уже готовой сборки. Расчёт моторов стоит начать именно с него.
Общий вес и необходимая тяга
Это пункт планировки, и возможно важнейшие характеристики. Нужно чётко понимать – сколько будет весить квадрокоптер. В общий вес идёт всё, включая пропеллеры, провода и полезную нагрузку. Исходя из формулы расчёта тяги, для достижения хороших полётных характеристик, двигатели твоего коптера должны поднимать его вес, помноженный на два.
Размер рамы и пропеллера
От размера и конфигурации рамы зависит то, сколько двигателей тебе придётся поставить, и на сколько большую диагональ пропеллеров ты сможешь использовать. Сейчас не буду вдаваться в подробности конфигурации, и рассказывать о том, как правильно подобрать раму. Просто напомню, что это ответственный узел, и на нём будет держаться всё, в том числе и тяжёлые, вибрирующие двигатели.

Запомни три простых правила.
- Тут важно не промахнуться с размером. Пропеллеры не должны наслаиваться. Проблемы доставляет и путаница с размерами. Добро пожаловать в мир дюймов
- Жёсткость рамы и её вес очень важны. Если есть возможность, то бери с запасом по прочности. Очень хорошо тебя показывают композитные материалы (карбоновая рама – предел мечтаний)
- Резьбы в пластике или вообще не могут считаться за резьбы, или являются одноразовыми. Ищи или металлические вставки, или думай, как ещё зафиксировать болты
От размера лопастей зависит поведение дрона в воздухе. Большая диагональ даст большую подъёмную силу и устойчивость, в ущерб маневренности, и наоборот. Здесь надо отталкиваться от своей цели. Так же нужно учитывать то, что пропеллер создаёт нагрузку на двигатель. Обычно рекомендованный размер будет указан в спецификации.
Питание

Тоже можно подсмотреть в спецификации. Обычная банка имеет номинальное напряжение 3.7в. При последовательном соединении суммируется напряжение, а при параллельном – ёмкость (она же время полёта). Это значит, что если ты видишь рекомендованный аккумулятор 2-3S Li-po (7,4-11,1V), то тебе потребуется два, или три последовательно соединённых литий-полимерных аккумулятора и соответствующая плата питания. В этом диапазоне всё будет работать (конечно, чем меньше- тем слабее). Параллельно можно суммировать только одинаковые блоки, но зато сколько душе угодно.
Маркировка двигателей для квадрокоптеров
На самом деле стандарта нет. Каждый лепит на свою продукцию что захочет. К счастью, есть общепринятые нормы, которые соблюдает большинство.
Первая буква отражает качество изготовления.
- «V» серия специально для ответственных мультикоптеров, изготовлена из лучших материалов при высочайшей точности сборки. Обычно, это гоночные электродвигатели, которые вращаются намного быстрее обычных
- «X» серия для моделей самолётов и мультикоптеров – середнячков. Хороший КПД, качество и сборка по терпимой цене
- «A» серия – Бюджетное решение, которое будет чуть хуже, чем предыдущие, но всё так же будет хорошо работать. Не стоит её пугаться
Первые четыре цифры, это параметры магнитопровода. Первые две –диаметр, вторые две –толщина набора. Они, на самом деле тебе не очень нужны. Не заморачивайся. Их тебе нужно знать в основном для того, чтобы понимать следующий параметр.
Спонтанный ликбез: Магнитопровод, это та часть двигателя или трансформатора, на которую намотана обмотка. Он набирается из пластин.
Количество витков
От количества витков зависит толщина провода, при равных параметрах магнитопровода. На один и тот же магнитопровод можно намотать 13 или 15 витков (к примеру). Чем больше витков, тем меньше диаметр сечения провода и выше внутреннее сопротивление. Отсюда, при равном питающем напряжении, при большем количестве витков, ток и обороты будут ниже. Это подтверждается параметром KV. Для бесщёточного двигателя с 15 витками оно будет ниже, чем у того же мотора, но с 13 витками.

Последняя буква – вид трёхфазного подключения – звезда или треугольник (Y/* или T/Δ соответственно). Снова не буду грузить электроникой, да и в случае с квадрокоптерами подключение не так важно.
- Мотор подключенный через звезду будет более мягко и плавно разгоняться, но не сможет развить максимальную заявленную мощность
- Подключение через треугольник даст более резкий набор скорости и полную заявленную мощность, но потребует намного больший пусковой ток
Возьмём для разбора такую маркировку A2212/15T.
22 – магнитопровод диаметром 22мм
12 — толщина набора 12мм
15 – 15 витков
А – Ширпотреб для бюджетных аппаратов
Т – (иногда заменяют на Δ) намотка типа дельта (треугольником)
Особенности моторов
CW и CCW

Это направления вращения, на которые рассчитан мотор. CW – по часовой стрелке, CCW – против. На самом деле направление вращения всегда можно изменить без потерь. Этот параметр скорее относится к креплению. При вращении в неправильную сторону мотор может разбалтываться, из-за особенностей крепления, или, если пропеллер фиксируется на резьбовом соединении, он будет откручиваться.
Тип магнитов
Мощность двигателей, и их кпд во многом зависят от силы постоянных магнитов ротора. Можно брать исключительно неодимовые магниты. Это, в основном, касается покупок из Китая, где могут подсунуть с виду работающий, но слабенький агрегат.
Кстати, важно, что неодим является крайне хрупким материалом, который плохо переживает удары. Ронять его не стоит, ибо могут появиться микротрещины, которые приведут к потере мощности.
Полый вал
Особым понтом считается полый вал двигателя. Если есть возможность, то стоит брать именно такой. Он совершенно не уступает по прочности цельному валу, так как центральная часть не нагружено, но немного экономит вес.
Шплинты и пружинные стопорные шайбы E clips, C clips
Из-за вибраций, создаваемых моторами и пропеллерами, винтики могут откручиваться или ослабевать. Это серьёзная проблема, ибо конструкция всегда должна быть жёсткой. Решается проблема использованием шплинтов или стопорных шайб.
Шплинт – вариант не самый лучший. Только для того, чтобы что-нибудь не отвалилось. Винтики им укрепить не получится.
Пружинная шайба – По сути, это небольшая пружинка, которая распирает болт в резьбе, тем самым делает его выкручивание проблематичным. Это отличный вариант для крепления любых узлов к раме, однако использовать его имеет смысл только если под шайбой имеется твёрдая поверхность (мягкий пластик не в счёт)
Итог
Дроны беспилотники, это достаточно сложный и точный механизм, который требует тщательного подхода к выбору комплектующих. Надеюсь, после прочтения этой статьи тебе стало понятно чуть больше о движущей силе твоего летательного аппарата.
И как всегда, банальное, но очень важное напутствие – думай, прежде чем делать. Даже куча потраченных денег на самое лучшее оборудование не гарантирует то, что оно будет работать хорошо. Отталкивайся от того, что нужно именно тебе. Читай, узнавай, анализируй.
Грузоподъемность квадрокоптера – одна из самых востребованных характеристик наряду со временем полета. Действительно, если представить, что мог бы поднимать достаточно большой вес и лететь при этом долго и далеко, то цены бы этому чуду техники не было. Прежде всего, это открыло бы путь к полноценной доставке товаров, а также помощи в экстренных ситуациях и . На сегодняшний день в мире разные компании делают первые робкие попытки внедрить квадрокоптеры в различные сферы жизни людей, связанные с подъёмом грузов. Иногда такие инициативы проходят. Так, например, на пляжах Франции уже дежурит несколько квадрокоптеров, способных в кратчайший срок доставить утопающему специальный надувной буй. Или, к примеру, такие знаменитые компании, как интернет-магазин Amazon и служба доставки DHL вовсю разрабатывают и тестируют доставку грузов с помощью дронов.
Конечно, развитие дроностроения шагает семимильными шагами, но на данный момент действительно грузоподъёмный квадрокоптер - это в основном привелегия тех, кто может позволить себе потратить довольно внушительную сумму. Причём с запросом на квадрокоптер, способный поднять 10 и более кг., заказчика скорее всего отправят искать энтузиастов, собирающих дроны вручную под конкретный запрос и конкретные характеристики.
Нам часто задают вопрос, сколько может поднять квадрокоптер? Отвечаем: в среднем до 5 кг, хотя все, конечно же, зависит от модели. Причем стоит учитывать, что указанный вес в основном предназначен для крепления съемочного оборудования – стабилизирующего подвеса и камеры.
Нельзя забывать и о том, что если вы приобретаете не специальный квадрокоптер для перевозки грузов, а обычный, стандартный дрон, пусть даже достаточно большого размера – использовать его в качестве полноценного летательного грузового средства без доработок не получится:
- Во-первых, придется продумывать самодельное крепление.
- Во-вторых, коптер может просто не поднять такой груз в воздух.
- В-третьих, даже если он поднимет, время разряда аккумулятора значительно увеличится, а управляемость снизится из-за неправильной нагрузки и несбалансированной винто-моторной группы.
Да, настоящий грузоподъемный квадрокоптер - Конечно, если только вы не хотите отправить, например, пирожок из одной комнаты в другую – тогда проблем нет:)

Квадрокоптер, грузоподъемность которого позволит поднимать до 10 кг – в настоящее время возможен, но это скорее будет индивидуальная разработка под конкретные параметры. Если квадрокоптер требуется для с/х нужд, то можно обратить внимание на . По заявлению производителя, он способен поднимать до 10 л жидкости и имеет специальное опрыскивательное устройство для орошения полей. Это готовое решение, но с узкой направленностью. Хотя, конечно, можно предположить, что на этом DJI не остановятся и вскоре представят универсальный квадрокоптер большой грузоподъемности, готовый и не требующий никаких дополнительных приспособлений.

Больше повезло тем, кто профессионально занимается кино- и фотосъёмкой: для таких запросов те же DJI постоянно совершенствуют специальные съёмочные квадрокоптеры, способные нести на борту профессиональные кинокамеры. Речь идёт, в частности, о квадрокоптере DJI Inspire 2. Он выпускается даже в нескольких комплектациях. Например, или (без камеры). Этот внушительный по своим габаритам дрон умеет не только таскать тяжеленные камеры (чуть больше 500 гр), но даже обогревать свои аккумуляторы для работы в минусовую температуру!

Для тех, у кого нет ни с/х, ни операторского интереса для подъёма достаточного веса квадрокоптером, советуем рассмотреть различные варианты так называемых полётных платформ. Для подъёма тяжёлого съёмочного оборудования они также могут подойти, но вся их прелесть состоит в том, что упрощённая конструкция позволит крепить различные грузы, не только камеры. Самый выдающийся на данный момент вариант такой платформы - это . Мало того, что эта модель имеет отличный показатель по времени и дальности полёта (до 40 минут и до 5 км. без загрузки), она способна к тому же поднимать до 6 кг. дополнительного веса!

Более скромная по грузоподъёмности, но и более приятная по цене платформа - это : способна поднимать чуть больше килограмма. Время полёта у неё тоже достаточно внушительное - до 40 минут без нагрузки. А вот дальность полёта будект поскромнее - до 2 километров. Но всё-таки как вариант эта модель тоже хороша, ведь мало какой квадрокоптер "из коробки" способен взять даже такой, казалось бы, небольшой вес.

Неплохим вариантом для подъёма небольших грузов (до 1,5 кг.) может стать рама . Правда, дальность и время полёта у неё уже ощутимо меньше, чем у предыдущего варианта, но и цена значитально выгоднее. К тому же, для многих убирающиеся шасси могут стать дополнительной приятной "фишкой".
На этом список мало-мальски грузоподъёмных квадрокоптеров, доступных для широких масс, пока заканчивается. Можно немного продолжить его моделями, справляющимися с дополнительными грузами около 200-300 гр. - ; до 100-150 гр. - , ; но при этом нельзя забывать, что чем меньше и легче дрон, тем сложнее ему справиться с максимальным дополнительным весом. Конечно, даже среднего размера квадрокоптеры с мощными смогут поднять в воздух грузы в 500-1000 гр., но с практической точки зрения это бесполезно, т.к. дрон становится сложноуправляемым, а продержаться в полёте с такой нагрузкой он сможет от силы 2-3 минуты.
Первые шаги в использовании радиоуправляемых дронов уже сделаны, правда, не все они были, к сожалению, удачными. Так, всем известна нашумевшая история о пиццерии из Сыктывкара, где была предпринята попытка доставки пиццы по воздуху. Напомним, что предприниматель был оштрафован на 50 000 рублей за «грузоперевозку без лицензии». Также в интернете есть ролик о SkyCafe, в котором еда буквально прилетает к вам на стол. Другой пример: известная медицинская организация Инвитро также опробовала грузоподъемный квадрокоптер и организовала доставку биоматериалов в Кабардино-Балкарии.
Однако похоже на то, что пока что это в основном частные случаи, потому как явного прорыва в такой характеристике как грузоподъемность коптера пока нет. Связано это с отсутствием на сегодняшний день мощных аккумуляторов, которые бы при небольшом собственном весе и объеме могли выдавать достаточное количество энергии для работы пропеллеров и тяжелой нагрузки. Так что квадрокоптер грузоподъемность 5 кг – реально, а вот квадрокоптер грузоподъемность 100 кг – пока только проект:) Тем не менее время доставки товаров коптерами - всё ближе и ближе.
Онлайн калькулятор пропеллеров eCalc известный по таким запросам как: propeller calculator, rc calculator, rc калькулятор - эффективное средство для расчета подбора двигателя с пропеллером для авиа модели. Этот калькулятор позволит Вам не только сохранить жизнь своему двигателю, но и увеличить срок эксплуатации, так же экономить ресурс батареи благодаря возможности выбрать оптимальные параметры для крейсерского режима (оптимальный режим).
Калькулятор только онлайн и расположен по этому адресу ECALC.CH . На главной странице (на английском) предлагается выбор (калькулятора) по типу модели и выбор языка:
- propCalc - калькулятор для пропеллеров самолета
- xcopterCalc - калькулятор для коптеров
- fanCalc - калькулятор импеллерных систем
- heliCalc - калькулятор для вертолетов
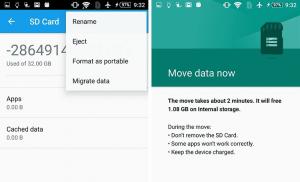
С годами ECALC урезал функционал для бесплатных пользователей, поэтому ниже скрины как обойти ограничения ECALC.CH плюс в довесок еще одна ссылка: http://rc-calc.com/ru/copter
Для тех кто понимает в html без слов понятно, описание для тех кто в первый раз. Видим, что AX-4008Q неактивен.
Нажимаем в браузере F12 (например в хроме или firefox) попадаем в "инспектора". Нажимаем на стрелку (на скрине отмечена цифрой 1), затем нажимаем на окно выбора (чего либо, пример с двигателем) по номером два на скрине и видим, что выделилась строка (под цифрой 3).
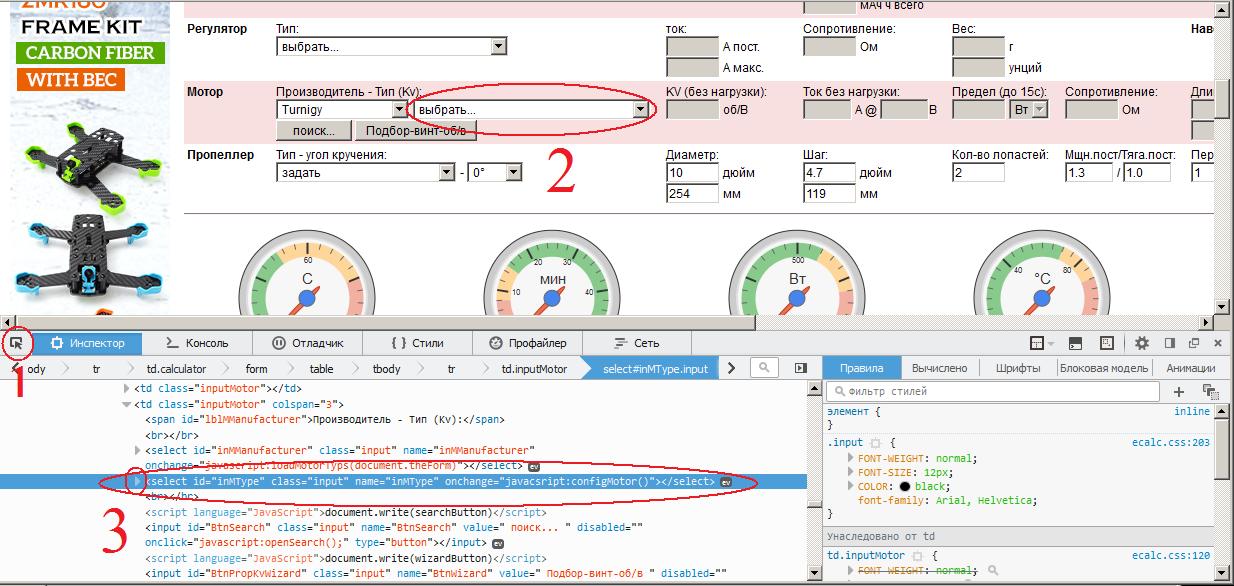
Нажимаем на эту строку, слева значек - развернуть. Видим в списке нужный двигатель видим, что стоит признак disable. Переделываем аналогично другим строкам, которые работают.

Пример исправленной строки.

С годами ECALC урезал функционал для бесплатных пользователей, поэтому в довесок еще одна ссылка: http://rc-calc.com/ru/copter
Продолжим наши занятия на тему квадрокоптера 🙂
Как уже замечал автор, управление тягой моторов осуществляется специальным микроконтроллером, который обрабатывает показания датчиков наклона и ускорения. Количество датчиков зависит от того, насколько автономной планируется система квадрокоптер – пилот.
Давайте рассмотрим основные составные части части квадрокоптера:
- Рама – основа всей конструкции, которая соединяет между собой все остальные части. Должна быть прочной и в то же время легкой.
- Двигатели, которые обеспечивают необходимую тягу для подъема квадрокоптера в воздух.
- Обороты каждого двигателя управляются отдельными контроллерами
- Пропеллеры (несущие винты)
- Источники питания – батареи или аккумуляторы
- Датчики ускорении/ угла наклона
- Микроконтроллер – мозг аппарата
- Приборы дистанционного управления
- Дополнительное оборудование
Рама (так же известна как крестовина)
Рама предназначена для соединения все компонентов конструкции в одно целое. Рама должна быть достаточно жесткой и в то же время обладать способностью гасить вибрации роторов.
Рама квадрокоптера , как правило, состоит из двух либо трех частей. Они не обязательно должны состоять из одного и того же материала.
- Центральная плита, на которую монтируются электронные компоненты
- Крестовина из 4 симметричных балок, которые крепятся к центральной плите
- Четыре мотогондолы, которые крепят двигатели к законцовкам балок крестовины.
Примечание переводчика: выражение «две или три части», вероятно означает, что с целью облегчения конструкции, центральная плита для размещения электроники, иногда не предусмотрена.
Для рамы подходят следующие материалы:
- Карбон
- Алюминий и его сплавы
- Дерево, например, фанера или МДФ
Наиболее предпочтительным для использования является карбон, из – за его жесткости и вибропоглощающих свойств, однако, и цена зачастую делает его недоступным для рядовых энтузиастов авиастроения:).
Популярностью при создании разного рода квадрокоптеров пользуются пустотелые алюминиевые профили (в основном – П-образные). Это вызвано их относительно низким весом, жесткостью и приемлемой ценой. В то же время, по сравнению с карбоном (углепластиком) , алюминий меньше поглощает вибрации, что может привести к искажению показаний датчиков. Фото именно такой крестовины приведено в заголовке статьи.
Плиты на основе древесины, например, МДФ – плиты или фанера также с успехом используются для создания квадрокоптеров из-за приемлемых вибропоглощающих характеристик. Однако, такие материалы не обладают высокой прочностью и могут быть легко повреждены в случае катастрофы. Несмотря на то, что материал центральной плиты не играет такой же важной роли, как материал для балок крестовины, чаще всего для ее изготовления применяется фанера как легкий и легко обрабатываемый материал, который хорошо поглощает вибрацию.
Для обозначения длины каждой из перекладин крестовины квадрокоптера иногда применяют термин «междвигательное расстояние», то есть дистанцию между валами противоположных роторов.
 Междвигательное расстояние
Междвигательное расстояние
Бесколлекторные двигатели
 Бесколлекторный двигатель изнутри
Бесколлекторный двигатель изнутри
Небольшое введение в теорию электродвигателей. Бесколлекторные двигатели, как и электродвигатели постоянного тока классической схемы, используют катушки с проводом и магниты для вращения приводного вала. Катушки в бесколлектроных двигателях расположены на внутренней стороне кожуха двигателя, и соответственно, в их конструкции отсутствуют щетки, предназначенные для передачи электрического тока на расположенные на валу катушки.
 И снаружи
И снаружи
Магниты в бесколлекторных двигателях расположены в цилиндре, насаженном на вал двигателя. Таким образом, провода питания присоединяются непосредственно к обмоткам катушек что исключает необходимость использования щеток.
 Устройство и принцип действия
. Обратите внимание на расположение магнитов.
Устройство и принцип действия
. Обратите внимание на расположение магнитов.
Преимуществом бесколлекторных двигателей является гораздо более высокая скорость вращения , а также меньшее энергопотребление в режимах работы, сравнимых с двигателями классической схемы. Кроме того, в бесколлекторных двигателях отсутствуют потери мощности из-за трения и искрения щеток и токосъемников, что делает их более энергоэффективными.
Существующие бесколлекторные двигатели в первую очередь различаются размерами и относительно малым потреблением энергии. При выборе двигателя для вашего квадрокоптреа, необходимо принять во внимание вес и размеры двигателей, характеристики несущих винтов, а также их соответствие относительному потреблению двигателей, которое описывается термином «kV Rating».
«kV Rating» показывает, сколько оборотов в минуту будет выдавать двигатель при определенном напряжении. Количество оборотов в минуту высчитывается по простой формуле: RPM=Kv*U (количество оборотов = напряжению питания умноженному на «kV Rating» ). Для упрощения расчетов, автор предлагает использовать онлайн – калькулятор eCalc , который считает прекрасным инструментом, который поможет рассчитать характеристики компонентов квадрокоптера в зависимости от запланированной грузоподъемности.
ВАЖНО! Не забудьте, что для квадрокоптреа необходимы две пары двигателей с противоположными направлениями вращения.
Пропеллеры (несущие винты)
Наверняка, на изображениях квадрокоптеров вы не заметили, что все их четыре винта не идентичны. Если приглядеться, можно заметить, что передний и задний несущие винты имею правый изгиб, в то время как на перепендикулярном плече крестовины несущие винты изогнуты наоборот .
Как автор указывал ранее, для предотвращения раскрутки аппарата, 2 ротора вращаются в одном направлении, в то время как два других – в противоположном. Пары воздушных винтов, которые вращаются в противоположных направлениях и имеют противоположное направление изгиба, обеспечивают подъемную силу в одном направлении без рысканья по курсу. Это и придает квадрокоптеру его знаменитую курсовую устойчивость.
Промышленно изготовленные воздушные винты для квадрокоптеров изготавливаются в разных диаметрах и с разными степенями изгиба (англ. – pitch, далее – шаг винта). Выбор пропеллера зависит от размаха балок несущей крестовины и определяет выбор двигателей. Ниже приведены несколько типоразмеров несущих винтов в зависимости от размеров квадрокоптеров.
 Пары несущих винтов правого или левого шага
Пары несущих винтов правого или левого шага
- EPP1045 10 diameter and 4.5 pitch — самый популярный, используется в проектах среднего размера.
- APC 1047 10 diameter and 4.7 pitch — весьма похож на вариант № 1
- EPP0845 8 diameter and 4.5 pitch как правило, применяется в малых квадрокоптерах
- EPP1245 12 diameter and 4.5 pitch – для больших аппаратов, которым необходима значительная тяга
- EPP0938 9 diameter and 3.8 pitch для маленьких квадрокоптеров
Аэродинамика никогда не была легкой наукой. Да же не думайте, что теорию воздушного винта можно уложить в несколько слов или даже часов. Однако, в общем, тему несущего винта в вертолете можно свести к двум следующим соотношениям:
- Больший диаметр и шаг воздушного винта определяет его большую тягу и возможность поднять больший груз. В то же время, для вращения такого винта необходима большая мощность двигателя.
- При использовании высокоборотистых моторов вы можете позволить себе задействовать винты меньшего диаметра. Однако, в случае снижения скорости оборотов, тяги несущих винтов может не хватить для удержания аппарата и груза в воздухе и даже для их относительно мягкой посадки.
Соотношение шага, диаметра и скорости вращения воздушного винта
Диаметр винта определяет его площадь , в то время как шаг винта – его эффективную площадь , которая и создает тягу. Таким образом, при равных диаметрах, воздушный винт с большим шагом создаст большую тягу и обеспечит большую грузоподъемность при бОльших затратах мощности.
Увеличение скорости вращения воздушного винта увеличит скорость и маневренность летательного аппарата, однако наложит ограничение на полезную нагрузку вне зависимости от затраченной на подъем мощности. В то же время, сила тяги (и соответственно, затраченная на вращение винта мощность), увеличивается при увеличении эффективной площади воздушного винта. Это означает, что больший диаметр или шаг воздушного винта позволит создать большую тягу при той же скорости вращения и поднять большую полезную нагрузку.
При выборе комбинации компонентов винтомоторной группы вашего квадрокоптера, в первую очередь, необходимо определить его будущее назначение . Например, если вам нужна высокая стабильность для полетов со значительной нагрузкой типа видеокамеры, ваш выбор – двигатель с меньшей скоростью вращения, однако значительным крутящим моментом и несущие винты большего диаметра или со значительным шагом.
То тебе нужно в первую очередь знать о том, как заставить «это» взлететь. Здесь есть два важных параметра – пропеллеры, и двигатели. Пропеллеры для квадрокоптера могут быть самыми разными, и каждый несёт в себе совой смысл. Сегодня я объясню тебе основные понятия и принципы, чтобы ты знал, как подобрать пропеллеры для своей модели. Располагайся, заваривай пельмешки, будет долго, и немного больно. Но тебе понравится.
Сразу оговорюсь, что в любом проектировании бывает достаточно много НО. Всё, что я скажу далее, это стартовые знания. Не бойся включать голову и задавать вопросы. Нет такой информации, которую нельзя найти в гугле, или спросить на форуме. Главное- умение ей пользоваться. Поехали!
- «В идеальном мире» — чисто теоретическое понятие, не берущее в расчёт побочные факторы
- Параметр «длинна», это и есть длинна пропеллера. Если точнее, то диаметр окружности, описываемой лопастями
- Параметр «шаг» можно сравнить с шагом резьбы. Это то расстояние, которое может пройти винт за один оборот (по аналогии с шурупом в дереве) . Чем больше угол атаки лопасти, тем больше это расстояние.
«Угол атаки», это Угол наклона лопасти, относительно горизонтальной плоскости - «Тяга», это сила, которая создаётся винтом. Она компенсируется остальными силами реакции (сопротивление воздуха, гравитация). Из этого следует, что пока тяга больше сопротивления – коптер будет разгоняться в направлении, противоположном вектору тяги.
Основные параметры
Количество

Количество лопастей винта влияет на подъёмную силу, стабильность и отзывчивость коптера (в идеальном мире). Чем больше лопостей, тем эти параметры лучше. На самом деле, многолопастные пропеллеры (2+) ставятся только на мелкие дроны. Это происходит из за дороговизны изготовления и сложности балансировки. В большом размере отбалансировать 4 лопасти очень дорого.
Чем их больше, тем стабильнее БПЛА. Малое количество негативно сказывается на управляемости.
Виды лопастей
- Normal (N) – Имеют заострённые на концах лезвия. Это уменьшает тягу, но и снижает расход энергии аккумулятора
- Bullnose (BN) – Бычий нос (Закруглённые). При равном с нормальными диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии акб.
- Hybrid Bullnose (HBN) – промежуточный вариант. Имеют как и преимущества, так и недостатки предыдущих.
Направление вращения

Для электродвигателей есть два направления вращения. CW – вращение вала по часовой стрелке, CCW – вращение вала против часовой стрелки. Направления нужно или чередовать (так как каждый пропеллер создаёт реакционную силу, которая стремится развернуть то, к чему он прикреплён, в направлении вращения), или размещать соосно на одном луче (тогда реакционная сила одного компенсирует оную у второго. Это более сложная компоновка. Используется, к примеру, на вертолёте «чёрная акула»).
На направление вращения самого пропеллера указывает поднятая кромка. Она смотрит в сторону вращения.
Материал
Пластик – наиболее популярный, но не самый удачный вариант. Пластиковые пропеллеры обладают низкой ценой и очень широки ассортиментом. Обладают разной, но в основном высокой гибкостью и мягкостью. Якобы это увеличивает их устойчивость к механическим повреждениям. На самом деле, любой, даже небольшой дефект лопасти, скорее всего, будет фатален. Там уже не важно, расколется она, или просто помнётся. Всё равно ты её меняешь.

Углеродное волокно – Очень дорого, но очень круто. Великолепная жёсткость, лёгкость. Легко сбалансировать. Это значит, что брака будет меньше. Не теряет форму. Да и наличие чёрных лопастей всегда радует глаз. К ним рекомендуется докупить защиту лопастей для квадрокоптера, ибо их очень легко расколоть.
Композит – внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость (почти) как у карбоновых пропеллеров. Также не очень высокая цена.
Вес
От веса зависит отзывчивость дрона по оси рысканья. Однако, с этим надо быть аккуратным, ибо также увеличивается нагрузка на мотор квадрокоптера.
Эластичность
Эластичность пропеллера улучшает устойчивость оного к перегрузкам и механическому воздействию (не путать с мягкостью).
Качество

Как правило, чем дороже, тем качественнее. Тут может быть много параметров. Основной, это балансировка. Качественный пропеллер балансировать не придётся. Так же важным моментом является качество материала.
Пластик может быть упругим и эластичным, а может быть мягким и НЕ эластичным. С этим нужно быть внимательным. Не смотря на кажущуюся простоту, от качества лопастей напрямую зависят лётные качества коптера.
Спецификация
Есть два типа обозначений.
- L- длинна
- P- шаг
- B- количество лопастей (для двух лопастей может не указываться)
Например, 5045×3 – длинна 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда приходится гадать. Тот же пропеллер может обозначаться 0545×3.
Например, 5×45х3 – длинна 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда в конце присутствует буква R или C. Она определяет направление вращения пропеллера.
- R – по часовой стрелке
- C – против часовой стрелки
Иногда в конце присутствует обозначение профиля лопасти. (подробнее смотри выше «виды лопастей»)
- N – нормальная (заострённая)
- BN – закруглённая
- HBN – промежуточная
Методы крепления и крепежи

Пропсейвер – Хороший вариант для проведения эксперементов, когда надо часто снимать и надевать пропеллер. Выглядит как втулка, которая притягивается к валу двигателя двумя винтами. Сам пропеллер надевается сверху, и притягивается резинками к выступающим винтам. Далеко не полетит, но можно побаловаться.
Цанговое крепление – рабочий вариант. На вал насаживается цанга (та, что с прорезями), потом зажимная втулка, пропеллер и шайба. Крепление надёжное и идеальное для полётов.
Outranner – Это не крепление, это разновидность бесколлекторного мотора, в котором ротор (вращающаяся часть) находится снаружи. На их верхней поверхности обычно находится несколько резьбовых отверстий, в которые крепится переходник (коих несметное количество).
Балансировка
Когда ты сэкономишь на пропеллере, ты точно удивишься тому, что он не отбалансирован. Из-за этого он будет вибрировать, на камере коптера ты будешь наблюдать эффект «желе», резьбовые соединения будут ослабевать, а моторы будут изнашиваться очень быстро. Надо балансировать.

Для этого тебе понадобится:
- Пропеллер
- Скотч\суперклей (на свой страх и риск)
- Мелкозернистая наждачная бумага
- Специальный инструмент — балансировщик пропеллеров
- Уровень
- Балансировщик устанавливаешь строго горизонтально.
- Устанавливаешь пропеллер на ось, в горизонтальное положение. Отпускаешь. Одна из лопастей падает вниз.
- Берёшь наждачку, и с внутренней стороны поднявшейся лопасти (с вогнутой) снимаешь немного материала. Не переусердствуй.
- Возвращаешь лопасти в горизонтальное положение. Если одна из них падает – повторяешь предыдущий пункт. Если нет- идём дальше
- Так как балансировщик тоже не лучшего качества- переворачиваешь ось и смотришь по новой. Нужно поймать момент, когда вне зависимости от направления оси, пропеллер будет сбалансирован.
- Молодец.
- Но не совсем. Теперь ступица. Устанавливаешь пропеллер вертикально. Если пропеллер наклоняется вправо- делаешь мазок лаком на левой стороне.
- Добиваешься баланса
- Меняешь направление горизонтальной оси пропеллера. Если всё по-прежнему в порядке- ты отбалансировал пропеллер. Надеюсь у тебя не октокоптер.
- Молодец!
Калькулятор Ecalc
Крайне удобный калькулятор, которые находится на официальном сайте Ecalc . В нём ты сможешь задать те запчасти, которые будешь использовать для своего проекта, а он выдаст тебе (очень) примерную модель поведения коптера.

Давай рассмотрим его поближе, так как он тебе точно пригодится.
Основное
- Тут ты выставляешь основные параметры своей сборки
- Полный вес модели можно указывать «без ВМГ» (винтомоторная группа = пропеллеры и моторы). При выборе пропеллеров и моторов калькулятор сам учтёт их вес
- Количество винтов – соосные винты, это два винта расположенных друг над другом, а одноосные это один винт на одном луче коптера. Для простоты, в нижнем правом углу, калькулятор рисует тебе конфигурацию
- Размеры рамы- По диагонали, от одного конца луча, до другого
- На остальное пока можешь забить. Оно уже стоит по стандарту. Высота, температура и давление может пригодится для расчёта полётных характеристик для разных высот
Аккумулятор
- Из списка выбираешь нужный, или максимально похожий аккумулятор, и состояние заряда «номинал»
- В поле «P» пишешь количество параллельно соеденённых аккумуляторов (если нужно)
Регулятор
- Из списка выбираешь свой регулятор скорости
- В навесном оборудовании пишешь суммарное потребление и вес всей той фигни, что ты хочешь повесить на свой дрон. Камера, диоды, сервоприводы, мелкокалиберные орудия. Если ты уже указал их вес в основном весе модели, то поле вес оставляешь с нулём
Мотор
Выбираешь производителя мотора из списка, и проверяешь по параметрам. Если похоже, то всё нормально, если нет, то продолжаешь «Охлаждение»
Пропеллер
- Выбираешь тип пропеллера из списка. Угол кручения (угол атаки), диаметр винта и его шаг ты узнаешь из спецификации
- Передаточное число используешь, если твой пропеллер присоединён к мотору через редуктор
Если в списках нет нужной позиции, то можно воспользоваться строкой Custom, и ввести всё самостоятельно.
RashVinta
Программа для расчёта параметров пропеллера для летательного аппарата.

Она может работать с тремя наборами исходных данных.
- Мощность двигателя + диаметр винта, который вам нужен
- Мощность двигателя + частота вращения
- Диаметр винта + шаг
В первом варианте
- Галочку на «расчёт по диаметру винта»
- Вводите нужный диаметр в см
- Вводите мощность двигателя в лошадиных силах, подсмотренную в параметрах двигателя (чтоб получить лошадей из кВт используй формулу кВт*1.36)
- Вводи максимальную скорость, которую позволит развить твой винт
- Введи среднюю скорость в поле «Скорость расчётная»
- Нажми кнопку расчёт
В результате ты увидешь необходимый шаг винта и частоту вращения.
Во втором варианте
- Убери все галочки
- Введи мощность двигателя
- Введи частоту вращения винта (двигателя, если нет редуктора)
- Введи максимальную и среднюю скорости
На выходе ты получаешь диаметр винта в сантиметрах и шаг винта.
Третий вариант
- Установи галочку в «указать параметры винта»
- Введи диаметр винта и шаг винта
- После нажатия на кнопку расчёт, программа рассчитает профили сечения винта (форма лопастей) на различных радиусах от центра. Результат ты получишь в окне просмотра, и в виде таблицы Date.html в каталоге программы.
- Кнопками со стрелками просматриваешь сечения на различных радиусах, а ползунком меняешь масштаб.
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!